Scalar Product (Dot Product)
In physics, many quantities are vectors such as force, displacement, velocity, and momentum. Sometimes we combine two vectors but the final result we need is only a number (a scalar). The mathematical operation used in such situations is called the scalar product or dot product.
The scalar product converts two vectors into a scalar quantity. This concept plays a crucial role in Work, Power and Energy, because the work done by a force depends on how much of the force acts along the direction of displacement.
Definition
The scalar product of two vectors is defined as the product of their magnitudes and the cosine of the angle between them.
\[ \boxed{\vec{A}\cdot\vec{B}=AB\cos\theta} \]
where
- \(A = |\vec A|\) is the magnitude of vector \(\vec A\)
- \(B = |\vec B|\) is the magnitude of vector \(\vec B\)
- \(\theta\) is the smaller angle between the two vectors
- The result is a scalar quantity (no direction)
Geometrical Interpretation
The scalar product measures how much one vector lies along the direction of another vector. If \(\vec A\) is projected onto \(\vec B\), the component of \(\vec A\) along \(\vec B\) is \(A\cos\theta\).
Therefore,
\[ \vec A\cdot\vec B = B \times (\text{component of } \vec A \text{ along } \vec B) \]
Important Properties
- 1. Commutative law \[ \vec A\cdot\vec B = \vec B\cdot\vec A \]
- 2. Distributive law \[ \vec A\cdot(\vec B+\vec C)=\vec A\cdot\vec B+\vec A\cdot\vec C \]
- 3. Multiplication by scalar \[ (\lambda \vec A)\cdot\vec B=\lambda(\vec A\cdot\vec B) \]
- 4. Dot product with itself \[ \vec A\cdot\vec A = A^2 \]
Dot Product of Unit Vectors
\[ \hat{i}\cdot\hat{i}=\hat{j}\cdot\hat{j}=\hat{k}\cdot\hat{k}=1 \]
\[ \hat{i}\cdot\hat{j}=\hat{j}\cdot\hat{k}=\hat{k}\cdot\hat{i}=0 \]
This shows that the coordinate axes are mutually perpendicular.
Scalar Product in Component Form
If
\[ \vec A = A_x\hat{i} + A_y\hat{j} + A_z\hat{k} \]
\[ \vec B = B_x\hat{i} + B_y\hat{j} + B_z\hat{k} \]
then the scalar product becomes
\[ \vec A\cdot\vec B = A_xB_x + A_yB_y + A_zB_z \]
Special Cases
- Parallel vectors (\(\theta=0^\circ\)) \[ \vec A\cdot\vec B = AB \]
- Perpendicular vectors (\(\theta=90^\circ\)) \[ \vec A\cdot\vec B = 0 \]
- Opposite direction (\(\theta=180^\circ\)) \[ \vec A\cdot\vec B = -AB \]
Worked Example
Two vectors have magnitudes \(5\) and \(6\) and the angle between them is \(60^\circ\). Find their scalar product.
Solution
\[ \vec A\cdot\vec B = AB\cos\theta \]
\[ = 5 \times 6 \times \cos60^\circ \]
\[ = 30 \times \frac{1}{2} = 15 \]
Connection with Work (Most Important Application)
In physics, the work done by a force is defined using the scalar product.
\[ W = \vec F\cdot\vec s \]
which gives
\[ W = Fs\cos\theta \]
This means only the component of force along the direction of displacement contributes to work.
Common Mistakes Students Make
- Forgetting that the result of a dot product is a scalar.
- Using the wrong angle (always use the smaller angle between vectors).
- Confusing dot product with cross product.
- Incorrect component formula (missing \(A_zB_z\)).
Significance of Scalar Product
The scalar product is extremely important in physics because it helps determine how strongly one vector acts along another direction. It is widely used in:
- Work done by a force
- Power delivered by a force
- Projection of vectors
- Determining perpendicular vectors
- Energy calculations in mechanics
Because Work = Force · Displacement, understanding the scalar product is essential for solving almost every problem in the chapter Work, Power and Energy.
Example-1
Find the angle between the force \( \vec F = (3\hat i +4\hat j -5\hat k) \) unit and displacement \( \vec d = (5\hat i +4\hat j +3\hat k) \) unit. Also find the projection of \( \vec F \) on \( \vec d \).
Concept Used
Angle between two vectors is obtained using the scalar product:
\[ \vec A\cdot\vec B = AB\cos\theta \]
Projection of vector \( \vec A \) on vector \( \vec B \):
\[ \text{Projection}=\frac{\vec A\cdot\vec B}{|\vec B|} \]
Step-1: Write the Vectors
\[ \vec F = 3\hat i +4\hat j -5\hat k \]
\[ \vec d = 5\hat i +4\hat j +3\hat k \]
Step-2: Find the Dot Product
\[ \vec F\cdot\vec d = (3)(5) + (4)(4) + (-5)(3) \]
\[ =15+16-15 \]
\[ \boxed{\vec F\cdot\vec d = 16} \]
Step-3: Magnitude of Vectors
\[ |\vec F|=\sqrt{3^2+4^2+(-5)^2} \]
\[ =\sqrt{9+16+25} =\sqrt{50} \]
\[ |\vec d|=\sqrt{5^2+4^2+3^2} \]
\[ =\sqrt{25+16+9} =\sqrt{50} \]
Step-4: Angle Between Vectors
\[ \vec F\cdot\vec d = |\vec F||\vec d|\cos\theta \]
\[ 16=\sqrt{50}\times\sqrt{50}\cos\theta \]
\[ 16=50\cos\theta \]
\[ \cos\theta=\frac{16}{50}=\frac{8}{25} \]
\[ \boxed{\theta=\cos^{-1}\left(\frac{8}{25}\right)} \]
Step-5: Projection of \(F\) on \(d\)
\[ \text{Projection of }F\text{ on }d= \frac{\vec F\cdot\vec d}{|d|} \]
\[ =\frac{16}{\sqrt{50}} \]
\[ \boxed{\text{Projection}=\frac{16}{\sqrt{50}}\ \text{units}} \]
Vector Visualization
Final Results
- Angle between vectors \[ \theta=\cos^{-1}\left(\frac{8}{25}\right) \]
- Projection of \(F\) on \(d\) \[ \frac{16}{\sqrt{50}}\text{ units} \]
THE WORK–ENERGY THEOREM
The Work–Energy Theorem is one of the most fundamental and elegant results in mechanics. It establishes a direct relationship between the work done by forces and the change in kinetic energy of a particle.
Instead of analyzing motion using acceleration and time step by step, this theorem allows us to solve many mechanics problems simply by considering energy changes.
Statement of Work–Energy Theorem
The work done by the net force acting on a particle is equal to the change in its kinetic energy.
\[ W = K_{final}-K_{initial} \]
\[ W=\Delta K \]
Derivation for Rectilinear Motion
Consider a particle moving along a straight line under constant acceleration. The kinematic relation is
\[ v^2-u^2=2as \]
where
- \(u\) = initial velocity
- \(v\) = final velocity
- \(a\) = acceleration
- \(s\) = displacement
Multiply both sides by \( \frac{m}{2} \):
\[ \frac{1}{2}mv^2-\frac{1}{2}mu^2=mas \]
From Newton's second law
\[ F=ma \]
therefore
\[ mas=Fs \]
But work done by force is
\[ W = Fs \]
Hence
\[ \boxed{W=\frac{1}{2}mv^2-\frac{1}{2}mu^2} \]
Vector Form (General Case)
In three dimensions, motion involves vectors. The kinematic relation becomes
\[ v^2-u^2=2\,\vec{a}\cdot\vec{d} \]
Multiplying by \(m/2\)
\[ \frac{1}{2}mv^2-\frac{1}{2}mu^2=m\,\vec{a}\cdot\vec{d} \]
Since
\[ \vec F=m\vec a \]
we obtain
\[ \boxed{\vec F\cdot\vec d = K_{final}-K_{initial}} \]
Illustration of Work–Energy Concept
Physical Interpretation
- If work done is positive, kinetic energy increases.
- If work done is negative, kinetic energy decreases.
- If net work done is zero, kinetic energy remains constant.
Example Application
A force performs \(50\,J\) of work on a particle initially at rest. Find its final kinetic energy.
Using the work–energy theorem
\[ W=\Delta K \]
\[ 50 = K_f - 0 \]
\[ K_f=50\,J \]
Key Observations
- The theorem depends only on initial and final states.
- It does not require solving motion using time.
- It works even when forces vary during motion.
Significance of Work–Energy Theorem
The Work–Energy Theorem is extremely useful because it allows us to solve complex mechanics problems without explicitly calculating acceleration or time. It forms the foundation for many powerful methods in physics such as energy conservation, potential energy analysis, and mechanical energy methods.
In many real problems (projectile motion, collisions, roller coasters, springs, etc.), analyzing energy changes is much simpler than applying Newton's laws directly.
Example-2
A raindrop falls under the influence of two forces:
- Downward gravitational force
- Upward air resistive force, proportional to the speed of the drop
A drop of mass \(1.00\ g\) falls from a height of \(1.00\ km\) and reaches the ground with a speed of \(50.0\ m\,s^{-1}\).
Find:
- (a) Work done by gravitational force
- (b) Work done by the resistive force
Given
\[ m = 1\ g = 10^{-3}\ kg \]
\[ h = 1\ km = 1000\ m \]
\[ v = 50\ m\,s^{-1} \]
Step-1: Change in Kinetic Energy
The drop starts from rest, therefore
\[ u = 0 \]
\[ \Delta K = \frac{1}{2}mv^2 - \frac{1}{2}mu^2 \]
\[ =\frac{1}{2}\times 10^{-3}\times 50^2 \]
\[ =\frac{1}{2}\times 10^{-3}\times 2500 \]
\[ \boxed{\Delta K = 1.25\ J} \]
Step-2: Work Done by Gravitational Force
Work done by gravity during the fall is
\[ W_g = mgh \]
\[ =10^{-3}\times 10\times 1000 \]
\[ \boxed{W_g = 10\ J} \]
Step-3: Work Done by Resistive Force
According to the Work–Energy Theorem
\[ \Delta K = W_{total} \]
Total work is the sum of work done by gravity and resistive force:
\[ \Delta K = W_g + W_r \]
\[ 1.25 = 10 + W_r \]
\[ W_r = 1.25 - 10 \]
\[ \boxed{W_r = -8.75\ J} \]
Physical Interpretation
- Gravity does positive work because force and displacement are in the same direction.
- Air resistance does negative work because it acts opposite to motion.
- The negative work reduces the kinetic energy gained during the fall.
Illustration
Final Results
- Work done by gravity \[ W_g = 10\ J \]
- Work done by resistive force \[ W_r = -8.75\ J \]
WORK
In physics, work is said to be done when a force acting on an object produces a displacement of that object.
The work done by a force is defined as the product of the component of the force along the direction of displacement and the magnitude of the displacement.
\[ W = (F\cos\theta)d \]
\[ W = \vec{F}\cdot\vec{d} \]
where
- \(F\) = magnitude of applied force
- \(d\) = displacement of the object
- \(\theta\) = angle between force and displacement
Visualization of Work
When is Work Done?
For work to be done, two conditions must be satisfied:
- A force must act on the body.
- The body must undergo displacement.
No Work is Done When
- The displacement of the body is zero.
- The applied force is zero.
- Force and displacement are perpendicular (\(\theta = 90^\circ\)).
Types of Work
- Positive Work When the force acts in the direction of displacement. \[ 0^\circ \le \theta < 90^\circ \] Example: Gravity acting on a falling object.
- Negative Work When the force acts opposite to displacement. \[ 90^\circ < \theta \le 180^\circ \] Example: Friction slowing down a moving object.
- Zero Work When force is perpendicular to displacement. \[ \theta = 90^\circ \] Example: Centripetal force in circular motion.
Dimensional Formula
\[ [W] = [ML^2T^{-2}] \]
Work and energy share the same dimensions because work represents a transfer of energy.
SI Unit of Work
\[ 1\ Joule = 1\ Newton \times 1\ meter \]
\[ 1\ J = 1\ N\cdot m \]
Alternative Units of Work / Energy
| Unit | Value in Joules |
|---|---|
| erg | \(10^{-7}\ J\) |
| electron volt (eV) | \(1.6\times10^{-19}\ J\) |
| calorie (cal) | \(4.186\ J\) |
| kilowatt hour (kWh) | \(3.6\times10^{6}\ J\) |
Significance of the Concept of Work
The concept of work forms the foundation of the entire chapter Work, Power and Energy. It provides the bridge between force and energy.
Understanding work allows us to analyze mechanical processes such as motion under forces, energy transfer, machines, engines, and physical systems ranging from microscopic particles to astronomical bodies.
The idea of work also leads directly to powerful principles such as the Work–Energy Theorem and the Conservation of Mechanical Energy.
INTRODUCTION TO ENERGY
In physics, energy is the capacity of a system to perform work. Whenever work is done on an object, its energy changes.
Energy exists in many forms such as kinetic energy, potential energy, thermal energy, electrical energy, and chemical energy.
In mechanics, the two most important forms are:
- Kinetic Energy – energy due to motion
- Potential Energy – energy due to position or configuration
In this section we focus on the first type: Kinetic Energy.
KINETIC ENERGY
If an object of mass \(m\) moves with velocity \(v\), it possesses kinetic energy.
Kinetic energy is the energy possessed by an object due to its motion.
\[ K = \frac{1}{2}m\,\vec v \cdot \vec v \]
\[ K = \frac{1}{2}mv^2 \]
Since it depends only on the magnitude of velocity, kinetic energy is a scalar quantity.
Physical Meaning
Kinetic energy represents the amount of work an object can perform because of its motion.
For example:
- A moving hammer can drive a nail into wood.
- A moving car can deform objects during collision.
- Flowing water can rotate turbines in a hydroelectric plant.
Derivation of Kinetic Energy Formula
Consider a body of mass \(m\) initially moving with velocity \(u\). A force accelerates it to velocity \(v\) over displacement \(s\).
From kinematics:
\[ v^2 - u^2 = 2as \]
Multiplying by \(m/2\)
\[ \frac{1}{2}mv^2 - \frac{1}{2}mu^2 = mas \]
Using \(F = ma\)
\[ \frac{1}{2}mv^2 - \frac{1}{2}mu^2 = Fs \]
Since \(Fs\) is work done \(W\),
\[ W = \frac{1}{2}mv^2 - \frac{1}{2}mu^2 \]
Thus kinetic energy is
\[ K = \frac{1}{2}mv^2 \]
Visualization of Kinetic Energy
Important Observations
- Kinetic energy depends on mass and the square of velocity.
- If velocity doubles, kinetic energy becomes four times.
- If mass doubles, kinetic energy becomes two times.
- Kinetic energy is always positive.
Example
A ball of mass \(2\,kg\) moves with speed \(3\,m\,s^{-1}\). Find its kinetic energy.
\[ K = \frac{1}{2}mv^2 \]
\[ =\frac{1}{2}\times2\times3^2 \]
\[ =9\ J \]
Significance of Kinetic Energy
Kinetic energy plays a central role in mechanics because it connects force, motion, and work.
It is fundamental in understanding phenomena such as collisions, motion of vehicles, planetary motion, flowing fluids, and the functioning of engines and machines.
The concept of kinetic energy also leads directly to the powerful Work–Energy Theorem and the principle of conservation of mechanical energy.
Example
In a ballistics demonstration a police officer fires a bullet of mass \(50.0\ g\) with speed \(200\ m\,s^{-1}\) on a soft plywood sheet of thickness \(2.00\ cm\).
The bullet emerges with only 10% of its initial kinetic energy. Find the emergent speed of the bullet.
Given
\[ m = 50\,g = 0.05\,kg \]
\[ v_i = 200\ m\,s^{-1} \]
Final kinetic energy = \(10\%\) of initial kinetic energy.
Step-1: Initial Kinetic Energy
\[ K_i = \frac{1}{2}mv_i^2 \]
\[ = \frac{1}{2}\times 0.05 \times (200)^2 \]
\[ = 0.025 \times 40000 \]
\[ \boxed{K_i = 1000\ J} \]
Step-2: Final Kinetic Energy
The bullet emerges with only \(10\%\) of its initial kinetic energy.
\[ K_f = 0.10 \times K_i \]
\[ K_f = 0.10 \times 1000 \]
\[ \boxed{K_f = 100\ J} \]
Step-3: Emergent Speed
\[ K_f = \frac{1}{2}mv_f^2 \]
\[ 100 = \frac{1}{2}\times0.05\times v_f^2 \]
\[ v_f^2 = \frac{2\times100}{0.05} \]
\[ v_f^2 = 4000 \]
\[ v_f = \sqrt{4000} \]
\[ v_f = 20\sqrt{10} \]
\[ \boxed{v_f \approx 63.2\ m\,s^{-1}} \]
Shortcut Insight (Useful for Exams)
Since kinetic energy is proportional to \(v^2\):
\[ \frac{K_f}{K_i} = \frac{v_f^2}{v_i^2} \]
\[ \frac{1}{10} = \frac{v_f^2}{(200)^2} \]
Taking square root:
\[ v_f = \frac{200}{\sqrt{10}} \]
\[ v_f \approx 63.2\ m\,s^{-1} \]
Visualization
Final Result
- Initial kinetic energy \(K_i = 1000\ J\)
- Final kinetic energy \(K_f = 100\ J\)
- Emergent speed \[ v_f \approx 63.2\ m\,s^{-1} \]
WORK DONE BY A VARIABLE FORCE
-xi.webp)
-xi.webp)
In many real physical situations, the force acting on a body is not constant. The force may change with position, time, or direction. Such a force is called a variable force.
For example:
- Force exerted by a spring depends on displacement.
- Air resistance depends on velocity.
- Gravitational force changes with distance.
Small Displacement Approximation
Suppose the body moves a very small distance \(\Delta x\). Over such a tiny interval, the force can be considered approximately constant.
\[ \Delta W = F(x)\,\Delta x \]
This represents the work done during the small displacement \(\Delta x\).
Total Work Done
To calculate the total work done between positions \(x_i\) and \(x_f\), we add the work done over many small intervals.
\[ W \approx \sum_{x_i}^{x_f} F(x)\,\Delta x \]
This sum represents the total of the rectangular areas shown in Fig. 5.2(a).
Exact Work Using Calculus
As the displacement intervals become smaller and smaller (\(\Delta x \to 0\)), the summation approaches a definite value.
This value equals the area under the force–displacement curve.
\[ W = \lim_{\Delta x \to 0} \sum_{x_i}^{x_f} F(x)\,\Delta x \]
\[ \boxed{W = \int_{x_i}^{x_f} F(x)\,dx} \]
This integral represents the exact work done by the variable force.
Graphical Interpretation
The work done by a variable force is equal to the area under the force–displacement graph.
- Area above the axis → Positive work
- Area below the axis → Negative work
Special Case: Constant Force
If the force remains constant, the integral simplifies to
\[ W = F(x_f - x_i) \]
which is the familiar formula
\[ W = Fd \]
Example
If a force varies with displacement according to \(F(x) = 2x\) N, find the work done in moving the body from \(x = 0\) to \(x = 3\) m.
\[ W = \int_0^3 2x\,dx \]
\[ = 2\int_0^3 x\,dx \]
\[ = 2\left[\frac{x^2}{2}\right]_0^3 \]
\[ = 9\ J \]
Significance
The concept of work done by a variable force is fundamental in physics because most real forces are not constant.
This idea allows us to analyze important systems such as springs, gravitational fields, electric fields, and fluid resistance.
It also introduces the powerful mathematical tool of integration, which plays a central role in advanced physics.
THE WORK–ENERGY THEOREM FOR A VARIABLE FORCE
In many physical situations the force acting on a body is not constant. The force may vary with position, time, or velocity. Even in such cases, the powerful relationship between work and kinetic energy still holds.
The work–energy theorem can therefore be extended to systems where the force changes continuously during motion.
Step-1: Kinetic Energy of a Moving Particle
\[ K=\frac{1}{2}mv^2 \]
To examine how kinetic energy changes with time, differentiate with respect to time.
Step-2: Time Rate of Change of Kinetic Energy
\[ \frac{dK}{dt} = \frac{d}{dt}\left(\frac{1}{2}mv^2\right) \]
\[ = m v\frac{dv}{dt} \]
Since
\[ \frac{dv}{dt}=a \]
\[ \frac{dK}{dt}=mav \]
Using Newton's second law
\[ F = ma \]
\[ \frac{dK}{dt}=Fv \]
Step-3: Express Velocity in Terms of Displacement
Velocity is the rate of change of position:
\[ v=\frac{dx}{dt} \]
Substituting into the previous equation:
\[ \frac{dK}{dt}=F\frac{dx}{dt} \]
Multiplying both sides by \(dt\):
\[ dK = F\,dx \]
Step-4: Integrating the Equation
Integrating from the initial position \(x_i\) to the final position \(x_f\):
\[ \int_{K_i}^{K_f} dK = \int_{x_i}^{x_f} F(x)\,dx \]
\[ K_f-K_i = \int_{x_i}^{x_f}F(x)\,dx \]
Final Result
\[ \boxed{K_f-K_i = W} \]
where
- \(K_i\) = initial kinetic energy
- \(K_f\) = final kinetic energy
- \(W\) = total work done by the variable force
Graphical Interpretation
For a variable force, the work done is equal to the area under the force–displacement graph.
\[ W=\int_{x_i}^{x_f}F(x)\,dx \]
Physical Meaning
- If total work is positive, kinetic energy increases.
- If total work is negative, kinetic energy decreases.
- If total work is zero, kinetic energy remains constant.
Significance
This generalized form of the Work–Energy Theorem is extremely important because most forces in nature are variable.
It allows us to analyze systems such as spring forces, gravitational forces, electric forces, air resistance, and molecular interactions.
Even when forces change continuously during motion, the change in kinetic energy of a particle is always equal to the work done by the net force acting on it.
THE CONCEPT OF POTENTIAL ENERGY
-
What Is Potential Energy?
Potential energy is the energy possessed by a body due to its position or its configuration in a force field.
A body may appear stationary, yet it can store energy that becomes evident when the body is allowed to move or change shape.
Examples include a raised object, a compressed spring, or water stored in a dam.
-
Origin of Potential Energy
Potential energy originates from the work done against a conservative force.
When work is done against such a force, the supplied energy does not disappear. Instead, it becomes stored in the system and can later be released to perform useful work.
-
Gravitational Potential Energy
When a body of mass \(m\) is lifted through a height \(h\) near the Earth's surface, work must be done against gravity.
This work is stored in the body as gravitational potential energy.
\[ U = mgh \]
where
- \(m\) = mass of the object
- \(g\) = acceleration due to gravity
- \(h\) = height above reference level
This formula is valid when the change in \(g\) with height is negligible.
-
Reference Level and Relativity
Potential energy is always defined relative to a reference level.
The zero level of potential energy can be chosen arbitrarily. What matters physically is the difference in potential energy.
For example, the ground is often chosen as the reference level where potential energy is taken as zero.
-
Elastic Potential Energy
When a spring is stretched or compressed, work must be done against the restoring force of the spring.
This work is stored as elastic potential energy.
\[ U = \frac{1}{2}kx^2 \]
where
- \(k\) = spring constant
- \(x\) = extension or compression
-
Potential Energy and Conservative Forces
Potential energy can be defined only for conservative forces.
A force is conservative if the work done by the force depends only on the initial and final positions, not on the path taken.
Examples of conservative forces include:
- Gravitational force
- Elastic (spring) force
- Electrostatic force
-
Interconversion of Potential and Kinetic Energy
Potential energy and kinetic energy continuously transform into each other during motion.
For example:
- A falling object converts gravitational potential energy into kinetic energy.
- A stretched spring converts elastic potential energy into motion.
When only conservative forces act, the total mechanical energy of the system remains constant.
Illustration of Potential Energy
Significance of Potential Energy
The concept of potential energy is fundamental in physics because it allows us to analyze systems using energy methods rather than directly applying Newton's laws.
It plays a central role in understanding phenomena such as planetary motion, oscillations, gravitational interactions, and the operation of machines and engines.
Together with kinetic energy, it forms the basis of the powerful principle of conservation of mechanical energy.
THE CONSERVATION OF MECHANICAL ENERGY
One of the most powerful ideas in physics is that energy cannot be created or destroyed; it can only change from one form to another. The principle of conservation of mechanical energy applies this idea to systems where only conservative forces act.
Instead of analyzing motion using forces and accelerations at every instant, we can study how energy transforms between kinetic energy and potential energy.
-
1. Meaning of Mechanical Energy
Mechanical energy is the total energy possessed by a system due to both motion and position.
It is the sum of:
- Kinetic energy (energy due to motion)
- Potential energy (energy due to position or configuration)
\[ \boxed{E = K + U} \]
-
2. Statement of the Principle
When only conservative forces act on a system, the total mechanical energy of the system remains constant.
\[ \boxed{K_i + U_i = K_f + U_f} \]
Individual forms of energy may change, but their total remains unchanged.
-
3. Physical Explanation
Conservative forces such as gravitational and spring forces have a special property: the work done depends only on the initial and final positions.
- When potential energy decreases, kinetic energy increases.
- When potential energy increases, kinetic energy decreases.
\[ \Delta K = -\Delta U \]
-
4. Illustration: A Falling Body
Consider a body released from rest at height \(h\).
- At the top: \[ K = 0, \quad U = mgh \]
- During the fall: potential energy converts into kinetic energy.
- Just before reaching the ground: \[ K = mgh, \quad U = 0 \]
\[ K + U = mgh = \text{constant} \]
-
5. Illustration: Spring–Mass System
In a spring–mass system, energy continuously transforms between kinetic and elastic potential energy.
- At equilibrium → kinetic energy maximum.
- At maximum compression/extension → kinetic energy zero.
\[ K + U = \text{constant} \]
-
6. Conditions for Validity
- Only conservative forces act.
- Friction and air resistance are negligible.
-
7. When Mechanical Energy Is Not Conserved
If non-conservative forces like friction act, mechanical energy decreases.
- Mechanical energy converts into heat, sound, or internal energy.
- Total energy of the universe is still conserved.
-
8. Importance of the Principle
- Simplifies complex mechanics problems.
- Avoids solving differential equations of motion.
- Helps determine heights, speeds, and positions.
- Forms the foundation for oscillations, projectiles, planetary motion, and energy conservation laws.
Example-3
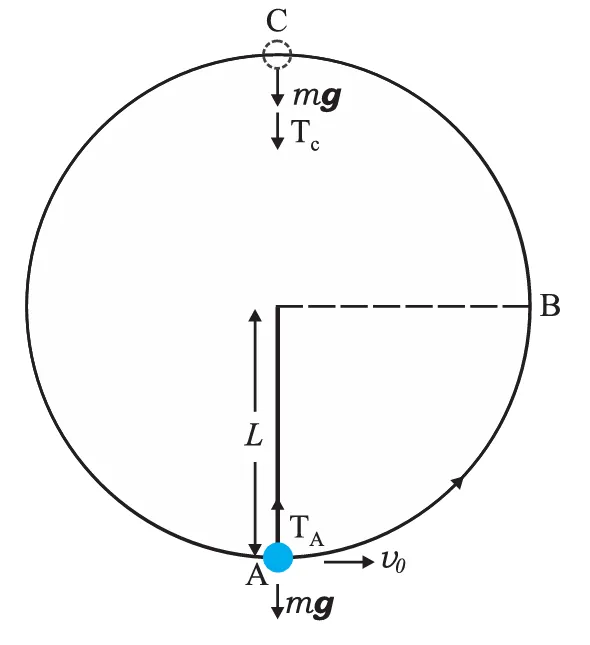
A bob of mass \(m\) is suspended by a light string of length \(L\). It is given a horizontal velocity \(v_0\) at the lowest point \(A\). The bob moves in a vertical plane and completes a semi-circular path with the string becoming slack exactly at the highest point \(C\).
Find:
- (i) Initial speed \(v_0\)
- (ii) Speeds at points \(B\) and \(C\)
- (iii) Ratio \(K_B/K_C\)
- Nature of the motion after reaching point \(C\)
Solution
Take the lowest point \(A\) as the reference level for gravitational potential energy.
1. Energy at Point A
At \(A\), the bob has only kinetic energy.
\[ E_A = \frac{1}{2}mv_0^2 \]
2. Condition at the Highest Point C
At point \(C\), the string just becomes slack. Therefore tension \(T = 0\).
Only the weight provides the centripetal force.
\[ mg = \frac{mv_C^2}{L} \]
\[ v_C^2 = gL \]
\[ v_C = \sqrt{gL} \]
3. Energy at Point C
Height of point \(C\) above \(A\) is \(2L\).
\[ E_C = \frac{1}{2}mv_C^2 + 2mgL \]
Substituting \(v_C^2 = gL\),
\[ E_C = \frac{1}{2}mgL + 2mgL \]
\[ E_C = \frac{5}{2}mgL \]
4. Initial Speed \(v_0\)
Using conservation of mechanical energy:
\[ E_A = E_C \]
\[ \frac{1}{2}mv_0^2 = \frac{5}{2}mgL \]
\[ v_0^2 = 5gL \]
\[ \boxed{v_0 = \sqrt{5gL}} \]
5. Speed at Point B
Point \(B\) is at height \(L\) above \(A\).
\[ E_B = \frac{1}{2}mv_B^2 + mgL \]
Using conservation of energy:
\[ \frac{1}{2}mv_B^2 + mgL = \frac{1}{2}m(5gL) \]
\[ v_B^2 = 3gL \]
\[ \boxed{v_B = \sqrt{3gL}} \]
6. Ratio of Kinetic Energies
\[ K_B = \frac{1}{2}m(3gL) = \frac{3}{2}mgL \]
\[ K_C = \frac{1}{2}m(gL) = \frac{1}{2}mgL \]
\[ \boxed{\frac{K_B}{K_C} = 3} \]
7. Motion After Point C
At point \(C\), the string becomes slack and cannot provide centripetal force. Therefore the bob leaves the circular path.
From that instant onward, the bob moves only under gravity. Hence it follows a projectile motion and its path becomes parabolic.
\[ v_0 = \sqrt{5gL} \] \[ v_B = \sqrt{3gL} \] \[ v_C = \sqrt{gL} \] \[ \frac{K_B}{K_C} = 3 \]
THE POTENTIAL ENERGY OF A SPRING
A spring is a simple mechanical system that can store energy when it is stretched or compressed. The energy stored in the spring due to its deformation is called elastic potential energy.
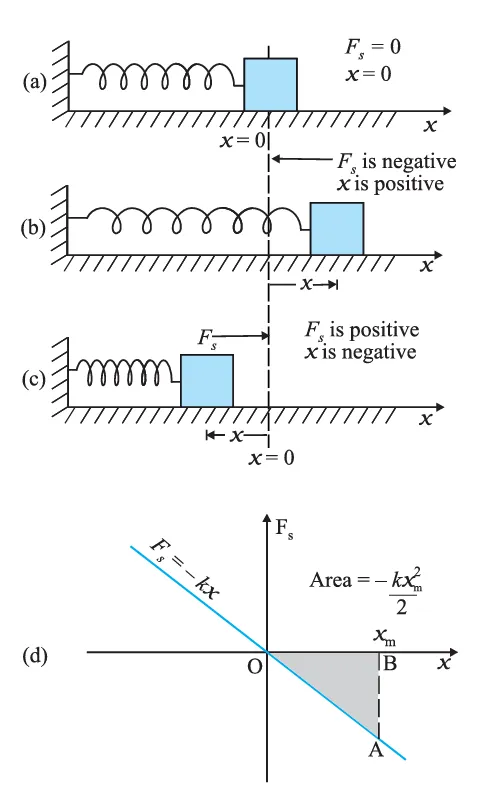
1. Hooke’s Law
For an ideal spring, the restoring force exerted by the spring is proportional to its displacement from the equilibrium position.
\[ F_s = -kx \]
where
- \(x\) = displacement from equilibrium position
- \(k\) = spring constant
The negative sign indicates that the spring force always acts opposite to the direction of displacement.
The unit of the spring constant is
\[ \text{N m}^{-1} \]
A spring is:
- Stiff if \(k\) is large
- Soft if \(k\) is small
2. Work Done by the Spring Force
Suppose the spring is stretched from equilibrium to displacement \(x_m\). The work done by the spring force is obtained by integration.
\[ W_s = \int_0^{x_m} F_s\,dx \]
\[ = \int_0^{x_m} (-kx)\,dx \]
\[ = -\frac{1}{2}kx_m^2 \]
The negative sign shows that the spring force opposes the displacement.
3. Work Between Two Positions
If the spring moves from displacement \(x_i\) to \(x_f\), the work done by the spring force is
\[ W = -\int_{x_i}^{x_f}kx\,dx \]
\[ W = \frac{1}{2}kx_i^2 - \frac{1}{2}kx_f^2 \]
Thus, the work done depends only on the initial and final positions of the spring.
4. Cyclic Motion
If the spring is stretched from \(x_i\) and then returned back to the same position,
\[ W = -\int_{x_i}^{x_i}kx\,dx \]
\[ W = 0 \]
Therefore, the work done by the spring force in a complete cycle is zero.
5. Potential Energy of a Spring
The elastic potential energy stored in a spring when it is stretched or compressed by a distance \(x\) is
\[ \boxed{U = \frac{1}{2}kx^2} \]
This energy is stored in the spring and can be released when the spring returns to its equilibrium position.
6. Conservative Nature of Spring Force
Since the work done by the spring force depends only on the initial and final positions, and the work done in a cyclic process is zero, the spring force is a conservative force.
Elastic potential energy stored in a spring: \[ U = \frac{1}{2}kx^2 \]
POWER
In physics, power measures how fast work is done or how quickly energy is transferred from one form to another.
In simple terms, power tells us the rate of doing work.
1. Average Power
Average power is defined as the total work done divided by the time taken.
\[ P_{\text{avg}}=\frac{W}{t} \]
where
- \(W\) = total work done
- \(t\) = time taken
2. Instantaneous Power
If a small amount of work \(dW\) is done in a very small time interval \(dt\), the instantaneous power is defined as
\[ P = \frac{dW}{dt} \]
Since the work done by a force is
\[ dW = \vec{F}\cdot d\vec{r} \]
dividing by \(dt\) gives
\[ P = \vec{F}\cdot \frac{d\vec{r}}{dt} \]
Since
\[ \frac{d\vec{r}}{dt}=\vec{v} \]
\[ \boxed{P=\vec{F}\cdot\vec{v}} \]
Thus, instantaneous power equals the dot product of force and velocity.
3. Interpretation of the Formula
- If force and velocity are in the same direction → power is positive.
- If they are opposite → power is negative.
- If they are perpendicular → power is zero.
4. Units of Power
The SI unit of power is the watt (W).
\[ 1\ \text{watt} = 1\ \text{joule per second} \]
\[ 1\,W = 1\,J\,s^{-1} \]
Larger units often used in practice:
- 1 kW = \(10^3\) W
- 1 MW = \(10^6\) W
- 1 horsepower ≈ 746 W
5. Dimensions of Power
\[ [P] = [ML^2T^{-3}] \]
6. Illustration
7. Significance
Power is an important concept in mechanics and engineering because it describes how quickly work can be performed.
Machines such as engines, motors, and turbines are rated based on the power they can deliver.
For example, a car engine with greater power can accelerate faster because it can deliver energy to the vehicle more rapidly.
COLLISIONS
In mechanics, a collision is a short-duration interaction between two or more bodies during which they exert strong forces on each other and exchange momentum.
Although the forces during a collision are usually very large, they act for a very short time interval. As a result, the motion of the bodies changes rapidly.
If the system of colliding bodies is isolated (i.e., no external force acts on it), the total linear momentum of the system remains conserved.
Conservation of Momentum
Suppose two bodies of masses \(m_1\) and \(m_2\) move along a straight line with initial velocities \(u_1\) and \(u_2\).
After collision their velocities become \(v_1\) and \(v_2\).
\[ m_1u_1 + m_2u_2 = m_1v_1 + m_2v_2 \]
This equation holds for all types of collisions as long as the system experiences no external impulse.
Elastic Collision
In an elastic collision, both the total linear momentum and the total kinetic energy of the system remain conserved.
Momentum conservation:
\[ m_1u_1 + m_2u_2 = m_1v_1 + m_2v_2 \]
Kinetic energy conservation:
\[ \frac{1}{2}m_1u_1^2 + \frac{1}{2}m_2u_2^2 = \frac{1}{2}m_1v_1^2 + \frac{1}{2}m_2v_2^2 \]
Examples of nearly elastic collisions include collisions between hard steel balls, billiard balls, or particles in ideal gases.
Inelastic Collision
In an inelastic collision, the total momentum is still conserved, but kinetic energy is not conserved.
Some of the kinetic energy is converted into other forms of energy such as heat, sound, or internal deformation.
Examples include collisions between vehicles, clay hitting a wall, or objects colliding with noticeable deformation.
Perfectly Inelastic Collision
A special case of inelastic collision is the perfectly inelastic collision.
In this case, the colliding bodies stick together and move with a common velocity after the collision.
\[ m_1u_1 + m_2u_2 = (m_1+m_2)v \]
This type of collision results in the maximum possible loss of kinetic energy consistent with the conservation of momentum.
Illustration of Collision
Key Observations
- Momentum is conserved in all collisions if no external force acts.
- Kinetic energy is conserved only in elastic collisions.
- In perfectly inelastic collisions, bodies move together after impact.
Significance
The study of collisions is fundamental in physics because it helps explain interactions ranging from molecular collisions in gases to vehicle impacts and particle interactions.
Conservation of momentum and energy during collisions is widely used to analyze motion in mechanics and particle physics.
Collisions in One Dimension
Consider a collision between two bodies of masses \(m_1\) and \(m_2\) moving along a straight line.
Let their initial velocities be \(u_1\) and \(u_2\), and after collision their velocities become \(v_1\) and \(v_2\).
In one-dimensional collisions the motion occurs along a single line.
1. Completely Inelastic Collision
In a perfectly inelastic collision the bodies stick together after impact and move with a common velocity \(v_f\).
Conservation of momentum:
\[ m_1u_1 + m_2u_2 = (m_1+m_2)v_f \]
If the second mass is initially at rest (\(u_2 = 0\)):
\[ v_f = \frac{m_1}{m_1+m_2}u_1 \]
Loss of Kinetic Energy
Initial kinetic energy:
\[ K_i = \frac12 m_1 u_1^2 \]
Final kinetic energy:
\[ K_f = \frac12 (m_1+m_2)v_f^2 \]
Substituting \(v_f\):
\[ K_f = \frac12 \frac{m_1^2}{m_1+m_2}u_1^2 \]
Loss in kinetic energy:
\[ \Delta K = \frac12 \frac{m_1 m_2}{m_1+m_2}u_1^2 \]
2. Elastic Collision
In an elastic collision both momentum and kinetic energy are conserved.
Momentum conservation:
\[ m_1u_1 + m_2u_2 = m_1v_1 + m_2v_2 \]
Kinetic energy conservation:
\[ \frac12 m_1u_1^2 + \frac12 m_2u_2^2 = \frac12 m_1v_1^2 + \frac12 m_2v_2^2 \]
Solving these equations gives the final velocities:
\[ v_1 = \frac{m_1-m_2}{m_1+m_2}u_1 + \frac{2m_2}{m_1+m_2}u_2 \]
\[ v_2 = \frac{2m_1}{m_1+m_2}u_1 + \frac{m_2-m_1}{m_1+m_2}u_2 \]
If the second mass is initially at rest (\(u_2 = 0\)):
\[ v_1 = \frac{m_1-m_2}{m_1+m_2}u_1 \]
\[ v_2 = \frac{2m_1}{m_1+m_2}u_1 \]
Special Cases
- Case I: Equal masses \[ m_1 = m_2 \] \[ v_1 = 0, \quad v_2 = u_1 \] The first mass stops and the second mass moves with the initial speed of the first body.
- Case II: Very heavy target \[ m_2 \gg m_1 \] \[ v_1 \approx -u_1, \quad v_2 \approx 0 \] The lighter particle rebounds with nearly the same speed, while the heavy body remains almost unaffected.
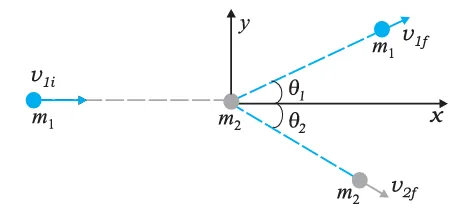
Collisions in Two Dimensions
In many physical situations collisions occur in a plane rather than along a single line. Such interactions are called two-dimensional collisions.
Consider a particle of mass \(m_1\) moving with initial velocity \(v_{1i}\) that collides with another particle of mass \(m_2\) initially at rest. After the collision the two particles move in different directions with velocities \(v_{1f}\) and \(v_{2f}\).
Since momentum is a vector quantity, conservation of momentum must be applied separately along each coordinate axis.
Let the collision occur in the \(x\text{-}y\) plane.
1. Conservation of Momentum
Along the \(x\)-direction:
\[ m_1 v_{1i} = m_1 v_{1f}\cos\theta_1 + m_2 v_{2f}\cos\theta_2 \]
Along the \(y\)-direction:
\[ 0 = m_1 v_{1f}\sin\theta_1 - m_2 v_{2f}\sin\theta_2 \]
These two equations describe how the total momentum is conserved in both directions during the collision.
2. Elastic Collision Condition
If the collision is elastic, kinetic energy is also conserved.
\[ \frac12 m_1 v_{1i}^2 = \frac12 m_1 v_{1f}^2 + \frac12 m_2 v_{2f}^2 \]
Thus three equations are available to determine the unknown quantities \(v_{1f}\), \(v_{2f}\), and the scattering angles.
3. Special Case: Equal Masses
When the two colliding masses are equal (\(m_1 = m_2\)) and the second particle is initially at rest, an interesting result follows.
Using momentum and energy conservation, it can be shown that the two final velocities are perpendicular to each other.
\[ \theta_1 + \theta_2 = 90^\circ \]
This phenomenon is often observed in collisions between identical billiard balls.
4. Physical Interpretation
- Momentum conservation must be applied separately along each axis.
- The direction of motion changes after the collision.
- In elastic collisions kinetic energy is also conserved.
5. Illustration
Significance
Two-dimensional collision analysis is widely used in particle physics, nuclear physics, and scattering experiments. The conservation laws of momentum and energy allow us to predict the directions and speeds of particles after interaction.
⚡ Work–Energy–Power–Collision Quick Revision Sheet
Entire Chapter Summary – Quick Formula & Concept Revision
Work
- \[ W = \vec F \cdot \vec d \]
- Work by variable force \[ W=\int F(x)\,dx \]
- Work–Energy theorem \[ W = K_f - K_i \]
Kinetic Energy
- \[ K = \frac12 mv^2 \]
- Change in KE equals work done.
Potential Energy
- Gravitational PE \[ U = mgh \]
- Spring PE \[ U = \frac12 kx^2 \]
Mechanical Energy
- \[ E = K + U \]
- Conservation condition \[ K_i + U_i = K_f + U_f \]
Power
- Average power \[ P = \frac{W}{t} \]
- Instantaneous power \[ P = \vec F \cdot \vec v \]
- Unit: \(1\,W = 1\,J\,s^{-1}\)
Collisions
- Momentum conservation \[ m_1u_1+m_2u_2=m_1v_1+m_2v_2 \]
- Elastic collision also conserves KE
- Perfectly inelastic collision \[ v = \frac{m_1u_1+m_2u_2}{m_1+m_2} \]
⚠️ Common Exam Traps
- Work can be negative when force opposes displacement.
- Power depends on both force and velocity direction.
- Momentum is conserved in all collisions (if no external force).
- Kinetic energy is conserved only in elastic collisions.
If you remember these five formulas you can solve most problems from this chapter:
\[ W = \vec F\cdot\vec d \] \[ K = \frac12 mv^2 \] \[ U = mgh,\quad U=\frac12kx^2 \] \[ E = K + U \] \[ P = \vec F\cdot\vec v \]
⚠️ Top 15 Conceptual Mistakes Students Make in Work–Energy–Power
Avoid these mistakes to solve problems faster in exams.
- Assuming work is always positive. Work becomes negative when force opposes displacement.
- Forgetting that work depends on displacement. No displacement → no work.
- Ignoring the angle in the work formula \[ W = Fd\cos\theta \]
- Thinking kinetic energy can be negative. Since \(K=\frac12mv^2\), it is always positive.
- Assuming mechanical energy is always conserved. It is conserved only when non-conservative forces are absent.
- Confusing power with force.
- Forgetting the vector nature of power: \[ P=\vec F\cdot\vec v \]
- Assuming momentum conservation requires elastic collision. Momentum is conserved in all collisions.
- Believing kinetic energy is conserved in every collision. It is conserved only in elastic collisions.
- Ignoring reference level in potential energy problems.
- Forgetting that gravitational potential energy depends on height difference: \[ U = mgh \]
- Not recognizing that spring force is a conservative force.
- Missing that work by conservative forces equals change in potential energy: \[ W = -\Delta U \]
- Forgetting that power measures the rate of energy transfer.
- Mixing up momentum and kinetic energy during collisions.
Most mistakes occur because students confuse momentum conservation with energy conservation.
🧠 Mind Map: Work–Energy–Power–Collision
Entire Chapter Connections in One Visual Map
- Work transfers energy between systems.
- Kinetic and potential energy form mechanical energy.
- Power measures the rate of energy transfer.
- Collisions involve momentum conservation.
Work → changes Energy Energy → determines Motion Power → rate of doing Work Collisions → conserve Momentum
⏱️ 30-Second Work–Energy–Power–Collision Final Revision
If you remember only these formulas and ideas, you can solve most problems from this chapter.
Core Formulas
- Work \[ W=\vec F \cdot \vec d \]
- Work–Energy Theorem \[ W = K_f-K_i \]
- Kinetic Energy \[ K=\frac12 mv^2 \]
- Gravitational PE \[ U=mgh \]
- Spring PE \[ U=\frac12 kx^2 \]
- Mechanical Energy \[ E = K + U \]
Power & Collision
- Average Power \[ P=\frac{W}{t} \]
- Instantaneous Power \[ P=\vec F \cdot \vec v \]
- Momentum Conservation \[ m_1u_1+m_2u_2=m_1v_1+m_2v_2 \]
- Perfectly Inelastic Collision \[ v=\frac{m_1u_1+m_2u_2}{m_1+m_2} \]
- Elastic Collision (1D, \(u_2=0\)) \[ v_1=\frac{m_1-m_2}{m_1+m_2}u_1 \] \[ v_2=\frac{2m_1}{m_1+m_2}u_1 \]
⚡ Concept Triggers for Exams
- Work done by conservative forces → change in potential energy.
- Mechanical energy conserved when friction is absent.
- Power tells how fast energy is transferred.
- Momentum conserved in all collisions (isolated system).
- Kinetic energy conserved only in elastic collisions.
Force → Work → Energy → Power → Momentum → Collisions
Master this chain and the entire chapter becomes easy.
🧭 Interactive Formula Map – Work, Energy, Power & Collisions
Visual map connecting every major concept of the chapter.
Concept Links
- Work changes the energy of a system.
- Kinetic and potential energy combine to form mechanical energy.
- Power measures how quickly work is done.
Collision Connections
- Momentum conservation governs collisions.
- Elastic collisions conserve kinetic energy.
- Inelastic collisions convert kinetic energy into internal energy.
Work → changes Energy Energy → determines Motion Power → rate of energy transfer Momentum → governs Collisions
Understanding these links means you have mastered the chapter.
📝 Practice Test – Work, Energy, Power & Collisions
Test your understanding with these mixed conceptual and numerical problems.
- A constant force of \(10\,\text{N}\) acts on a body and moves it through \(5\,\text{m}\) in the direction of the force. Find the work done.
- A body of mass \(2\,\text{kg}\) moves with velocity \(4\,\text{m s}^{-1}\). Calculate its kinetic energy.
- A stone of mass \(0.5\,\text{kg}\) is lifted to a height of \(10\,\text{m}\). Determine its gravitational potential energy.
- A spring with spring constant \(200\,\text{N m}^{-1}\) is stretched by \(0.10\,\text{m}\). Find the elastic potential energy stored in the spring.
- A machine does \(300\,\text{J}\) of work in \(5\,\text{s}\). Calculate its average power.
- A force \( \vec{F} = 5\hat{i} \) N acts on a particle moving with velocity \( \vec{v} = 3\hat{i} + 4\hat{j} \,\text{m s}^{-1} \). Find the instantaneous power delivered by the force.
- A \(1\,\text{kg}\) ball moving with velocity \(6\,\text{m s}^{-1}\) collides elastically with another identical ball initially at rest. Find their velocities after collision.
- Two bodies of masses \(2\,\text{kg}\) and \(3\,\text{kg}\) moving with velocities \(4\,\text{m s}^{-1}\) and \(0\,\text{m s}^{-1}\) collide and stick together. Find their final velocity.
- A body slides down a frictionless track from height \(h\). Using conservation of mechanical energy, determine its speed at the bottom.
- During a collision, the total momentum of an isolated system remains constant. Explain why kinetic energy may still change.
If you can solve at least 7 out of 10 questions correctly, you have a strong understanding of this chapter.
🎯 10 Most Important JEE/NEET Question Patterns – Work, Energy & Power
These problem types appear repeatedly in JEE, NEET, BITSAT and other entrance exams.
-
Work from Force–Displacement Graph
Students are asked to calculate work as the area under the \(F-x\) graph. -
Variable Force Work
Problems where force depends on displacement such as \[ F = kx \quad \text{or} \quad F = ax^2 \] requiring \[ W = \int F(x)\,dx \] -
Work–Energy Theorem Applications
Determining speed or displacement using \[ W = K_f - K_i \] -
Energy Conservation Problems
Typical examples include falling objects, pendulums, roller-coaster motion and inclined planes using \[ K_i + U_i = K_f + U_f \] -
Spring Energy Problems
Compression/extension of springs using \[ U = \frac12 kx^2 \] -
Maximum Height / Speed from Energy
Converting kinetic energy to potential energy: \[ \frac12 mv^2 = mgh \] -
Power of a Force
Questions asking instantaneous power using \[ P = \vec F \cdot \vec v \] -
Engine or Machine Power Problems
Determining power required to move vehicles or lift loads using \[ P = \frac{W}{t} \] -
Energy Loss in Inelastic Collision
Calculating loss of kinetic energy when bodies stick together. -
Mixed Energy–Momentum Problems
Combining conservation of momentum with energy concepts in collisions.
If you master these 10 question patterns, you can solve nearly all problems from this chapter in competitive exams.
📥 Downloadable Formula Sheet – Work, Energy & Power
Download the complete formula sheet for quick offline revision.
Included in the Formula Sheet
- Work and Scalar Product formulas
- Work–Energy Theorem relations
- Kinetic Energy and Potential Energy formulas
- Mechanical Energy conservation equations
- Spring potential energy relations
- Power formulas and units
- Elastic and inelastic collision formulas
- Key problem-solving shortcuts for exams
Formula Sheet
One-page summary of all important formulas from this chapter.
Perfect for quick exam revision.
Keep this formula sheet saved on your phone or printed so you can revise the entire chapter in under 2 minutes.