Academia Aeternum
तमसो मा ज्योतिर्गमय
Master Newton’s Laws, friction, momentum and circular motion with visual notes, formula capsules and exam‑centric practice.
Start Reading Detailed NotesAristotle’s Fallacy, Galileo’s Law of Inertia and the transition to Newton’s First Law.
First Law, Second Law, Third Law, free‑body diagrams and equilibrium of a particle.
Static, kinetic & rolling friction, centripetal force, cars on level and banked roads, centrifugal force.
For the full list, see the Laws of Motion Formula Sheet section.
Aristotle’s Fallacy refers to the incorrect ancient belief proposed by the Greek philosopher Aristotle (384–322 BC) regarding the nature of motion. Aristotle argued that a body can remain in motion only if a continuous external force is applied to it.
According to his idea, the moment the applied force disappears, the motion of the object should immediately stop. In other words, Aristotle believed that force is required to maintain motion.
Aristotle’s conclusion was based on everyday observations. For example, when we push a book across a table, it moves only for a short distance and eventually stops. From this observation, Aristotle concluded that motion stops because the applied force is removed.
However, the real reason the book stops is the presence of friction between the book and the table surface, which continuously opposes the motion.
The major limitation of Aristotle’s reasoning was that he did not distinguish between two different roles of force in motion.
In reality, an object stops moving because resistive forces like friction continuously act opposite to the direction of motion. If these opposing forces were completely absent, the object would continue moving indefinitely.
The flaw in Aristotle’s reasoning was corrected many centuries later through the work of Galileo Galilei and finally formalized by Newton’s First Law of Motion, which states that:
Consider pushing a hockey puck across smooth ice. The puck travels a long distance before stopping because friction between the ice and the puck is extremely small. If friction were completely eliminated, the puck would continue moving forever with constant velocity.
Galileo’s Law of Inertia is one of the most important ideas in the historical development of mechanics. It was proposed by the Italian scientist Galileo Galilei (1564–1642) through careful experiments with rolling balls on inclined planes.
Galileo realized that objects do not naturally come to rest by themselves. Instead, they stop moving because of external resistive forces such as friction and air resistance. When these forces are absent, motion can continue indefinitely.
This idea later became the foundation for Newton’s First Law of Motion.
Galileo performed a series of experiments using smooth inclined planes and rolling balls to study motion. These experiments helped him understand how motion behaves in the absence of friction.
Newton’s First Law of Motion describes the natural behavior of objects when no external force acts on them. It establishes the fundamental idea that motion does not require a continuous force.
This law is also known as the Law of Inertia because it describes the natural tendency of matter to resist any change in its state of motion.
According to this law, if the total external force acting on a body is zero, the body will either remain at rest or continue moving with constant velocity.
The property of matter that resists any change in its state of rest or motion is called inertia. Newton’s First Law provides the formal scientific description of inertia.
Newton’s Second Law of Motion provides a quantitative description of the relationship between force, mass, and acceleration. It explains how the motion of a body changes when an external force acts on it.
This law provides the mathematical definition of force and forms the foundation for most calculations in mechanics.
The momentum of a body is defined as the product of its mass and velocity.
\[ \vec{p}=m\vec{v} \]where:
Momentum is a vector quantity, meaning it has both magnitude and direction.
Suppose a body of mass \(m\) changes its velocity from \(\vec{v}\) to \(\vec{v}+\Delta\vec{v}\) in a small time interval \(\Delta t\).
Initial momentum:
\[ \vec{p}=m\vec{v} \]Change in momentum:
\[ \Delta\vec{p}=m\Delta\vec{v} \]According to Newton’s Second Law:
\[ \vec{F}\propto \frac{\Delta\vec{p}}{\Delta t} \]Introducing a proportionality constant \(k\):
\[ \vec{F}=k\frac{\Delta\vec{p}}{\Delta t} \]In SI units \(k=1\), therefore:
\[ \vec{F}=\frac{d\vec{p}}{dt} \]For a body of constant mass:
\[ \vec{F}=m\frac{d\vec{v}}{dt} \]Since acceleration \( \vec{a}=\frac{d\vec{v}}{dt} \), we obtain:
\[ \boxed{\vec{F}=m\vec{a}} \]In the SI system, the unit of force is the newton (N).
\[ 1\ \mathrm{N}=1\ \mathrm{kg\,m\,s^{-2}} \]One newton is defined as the force required to produce an acceleration of \(1\,\mathrm{m\,s^{-2}}\) in a mass of \(1\,\mathrm{kg}\).
Newton’s Second Law is a vector equation and can be resolved into three components:
\[ F_x=\frac{dp_x}{dt}=ma_x \] \[ F_y=\frac{dp_y}{dt}=ma_y \] \[ F_z=\frac{dp_z}{dt}=ma_z \]Impulse is the effect of a force acting over a short time interval.
\[ \text{Impulse}=F\Delta t \]Even a very large force acting for a very small time interval can significantly change the momentum of a body.
According to Newton’s Second Law, impulse equals the change in momentum of a body.
\[ F\Delta t=\Delta p \]Newton’s Third Law of Motion explains how forces always arise from the interaction between two bodies. Whenever one body exerts a force on another, the second body simultaneously exerts a force of equal magnitude in the opposite direction.
This law means that forces always occur in pairs. No force exists independently; it always results from the interaction between two objects.
If body A exerts a force on body B, then body B exerts an equal and opposite force on body A.
\[ \boxed{\vec{F}_{AB}=-\vec{F}_{BA}} \]where:
The Law of Conservation of Momentum is one of the most fundamental principles of mechanics. It states that when no external force acts on a system, the total momentum of the system remains constant.
A system that is not influenced by external forces is called an isolated system.
Consider two bodies A and B that interact with each other during a collision.
Let their initial momenta be:
\[ \vec{P}_A = m_A\vec{v}_A \] \[ \vec{P}_B = m_B\vec{v}_B \]After collision, their final momenta become:
\[ \vec{P}_A' = m_A\vec{v}_A' \] \[ \vec{P}_B' = m_B\vec{v}_B' \]According to Newton’s Second Law, the change in momentum equals the impulse:
\[ \vec{F}_{AB}\Delta t = \vec{P}_A' - \vec{P}_A \] \[ \vec{F}_{BA}\Delta t = \vec{P}_B' - \vec{P}_B \]By Newton’s Third Law:
\[ \vec{F}_{AB} = -\vec{F}_{BA} \]Therefore,
\[ \vec{P}_A' - \vec{P}_A = -(\vec{P}_B' - \vec{P}_B) \]Rearranging,
\[ \vec{P}_A + \vec{P}_B = \vec{P}_A' + \vec{P}_B' \]This shows that the total momentum before collision equals the total momentum after collision.
\[ \boxed{\vec{P}_{initial} = \vec{P}_{final}} \]In mechanics, a particle is said to be in equilibrium when the net external force acting on it is zero.
According to Newton’s First Law of Motion, if the net force on a particle is zero, the particle will either:
If only two forces act on a particle, equilibrium requires that the forces must be equal in magnitude and opposite in direction.
\[ \vec{F}_1+\vec{F}_2=0 \]This means the forces cancel each other and the particle remains in equilibrium.
If three forces \( \vec{F}_1, \vec{F}_2, \vec{F}_3 \) act simultaneously at a point, equilibrium requires that their vector sum is zero.
\[ \vec{F}_1+\vec{F}_2+\vec{F}_3=0 \]Forces that act through the same point are called concurrent forces.
Since force is a vector quantity, the equilibrium condition can also be written in terms of components along coordinate axes.
\[ F_{1x}+F_{2x}+F_{3x}=0 \] \[ F_{1y}+F_{2y}+F_{3y}=0 \] \[ F_{1z}+F_{2z}+F_{3z}=0 \]These equations mean that the sum of forces along each coordinate direction must individually be zero.
Friction is the force that resists the relative motion or the tendency of motion between two surfaces that are in contact. It is a common force encountered in everyday life and plays an essential role in activities such as walking, writing, driving vehicles, and holding objects.
Without friction, many everyday tasks would become impossible. For example, we would not be able to walk on the ground, write on paper, or apply brakes to a moving vehicle.
At the microscopic level, surfaces appear rough due to tiny irregularities. These irregularities interlock with each other, producing frictional resistance.
Static friction acts when a body is at rest and an external force attempts to move it.
Example: Pushing a heavy box that initially does not move.
When the applied force exceeds limiting friction, the body starts sliding and kinetic friction comes into action.
Example: A book sliding on a table.
Rolling friction occurs when a body rolls over a surface.
Example: A bicycle moving on a road.
The maximum value of static friction just before a body begins to move is called limiting friction.
\[ f_{max} = \mu_s N \]where:
where \( \mu_k \) is the coefficient of kinetic friction.
Circular motion refers to the motion of a body along a circular path. Even when the speed of the body remains constant, its velocity continuously changes because the direction of motion changes at every point of the circle.
For a body moving with speed \(v\) in a circle of radius \(R\), the acceleration directed toward the centre of the circle is:
\[ a_c=\frac{v^2}{R} \]This acceleration is always directed toward the centre of the circular path and is therefore called centripetal acceleration.
According to Newton’s Second Law of Motion, force is required to produce this centripetal acceleration.
\[ F_c = m a_c \]Substituting the value of centripetal acceleration:
\[ F_c=\frac{mv^2}{R} \]where:
This force acting toward the centre of the circle is called the centripetal force.
Since linear speed \(v = \omega R\), centripetal acceleration can also be written as:
\[ a_c=\omega^2R \]Therefore the centripetal force can also be expressed as:
\[ F_c=m\omega^2R \]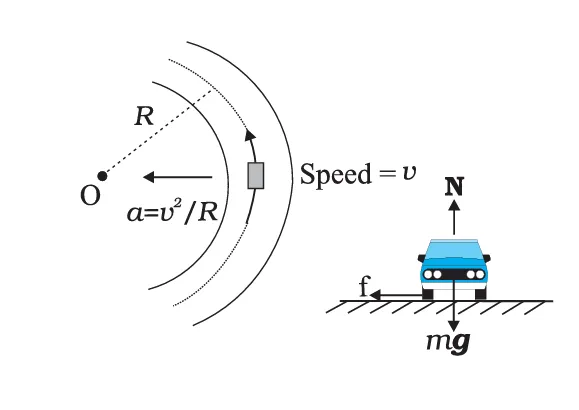
When a car moves along a circular path on a level road, it requires a centripetal force directed toward the centre of the circle to maintain circular motion.
On a level road, this required centripetal force is provided entirely by static friction between the tyres and the road.
Since there is no acceleration in the vertical direction, the normal reaction balances the weight of the car.
\[ N - mg = 0 \] \[ N = mg \]Static friction provides the centripetal force required for circular motion:
\[ f = \frac{mv^2}{R} \]The maximum possible value of static friction is:
\[ f_{max} = \mu_s N \]Therefore, for the car to remain on the circular path:
\[ \frac{mv^2}{R} \le \mu_s N \] Substituting \(N = mg\): \[ \frac{mv^2}{R} \le \mu_s mg \] \[ v^2 \le \mu_s R g \]Hence, the maximum possible speed is
\[ \boxed{v_{max}=\sqrt{\mu_s R g}} \]Interestingly, this result is independent of the mass of the car.
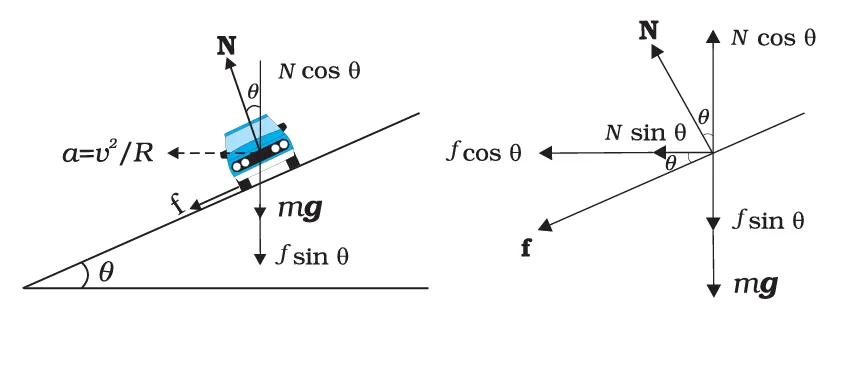
When a car moves along a curved road, the required centripetal force must act toward the centre of the circular path. If the road is banked (tilted at an angle \( \theta \)), a component of the normal reaction helps provide this centripetal force.
Banking reduces the dependence on friction and allows vehicles to safely negotiate curves at higher speeds.
Since there is no acceleration in the vertical direction,
\[ N \cos\theta = mg + f \sin\theta \tag{1} \]The horizontal components of \(N\) and \(f\) provide the required centripetal force.
\[ N \sin\theta + f \cos\theta = \frac{mv^2}{R} \tag{2} \]The maximum speed occurs when friction reaches its limiting value:
\[ f = \mu_s N \]Substituting into equation (1):
\[ N\cos\theta = mg + \mu_s N \sin\theta \] \[ N(\cos\theta - \mu_s \sin\theta) = mg \] \[ N = \frac{mg}{\cos\theta - \mu_s \sin\theta} \]Substituting this value of \(N\) into equation (2):
\[ N(\sin\theta + \mu_s \cos\theta) = \frac{mv^2}{R} \] \[ \frac{mg(\sin\theta + \mu_s \cos\theta)} {\cos\theta - \mu_s \sin\theta} = \frac{mv^2}{R} \]Therefore, the maximum speed of the car is
\[ \boxed{ v_{max}= \sqrt{ Rg \frac{\sin\theta + \mu_s \cos\theta} {\cos\theta - \mu_s \sin\theta} } } \]If friction is negligible (\(f=0\)), the centripetal force is provided entirely by the horizontal component of the normal reaction.
\[ N\cos\theta = mg \] \[ N\sin\theta = \frac{mv^2}{R} \] Dividing the two equations: \[ \tan\theta = \frac{v^2}{Rg} \] \[ v = \sqrt{Rg\tan\theta} \]When we observe circular motion from a rotating frame of reference, an apparent outward force seems to act on the body. This apparent force is called the centrifugal force.
The magnitude of centrifugal force is equal to the centripetal force required to maintain circular motion.
\[ F_{cf} = \frac{mv^2}{R} \]where
While centripetal force acts toward the centre, centrifugal force appears to act away from the centre.
The concept of centrifugal force is closely related to the type of reference frame used to observe motion.
This quick revision section summarizes the most important formulas from NCERT Physics Class XI – Laws of Motion. Use it for rapid revision before board exams, JEE Main, NEET, and other competitive exams.
Many students lose marks in board exams and competitive examinations due to small conceptual misunderstandings in Newton’s Laws and friction problems. Avoid these common mistakes.
If you have only 30 seconds before an exam, revise these key ideas from the Laws of Motion chapter.
Competitive examinations such as JEE Main, JEE Advanced, and NEET repeatedly test certain standard problem patterns from the Laws of Motion chapter. Understanding these patterns helps students solve a large number of exam questions quickly.
This visual mind map summarizes the most important ideas from the Laws of Motion chapter. It helps students quickly connect key concepts before exams such as CBSE Boards, JEE Main, and NEET.
Test your understanding of the Laws of Motion chapter with this quick practice quiz. Select the correct answers and click Check Score.
Practice identifying forces by building a Free Body Diagram (FBD). Drag force arrows onto the block, rotate them to match directions, and reset when done.
Choose a scenario, drag the forces onto the object, and click Check Diagram. The tool will verify whether the correct forces are present.
Found this helpful? Share this chapter with your friends and classmates.
💡 Exam Tip: Share helpful notes with your study group. Teaching others is one of the fastest ways to reinforce your own understanding.
Get in Touch
Questions, feedback, or suggestions?
We'd love to hear from you.